products






























tech info

Electric Water Vcalve
Steam Solenoid Valve
What's The Air Solenoid Valvce?
Two Ways Solenoid Valve Normal Purpose
Auto Drain Valve
All Product Information

Air Filter Regulator Lubricatorc
Air Compressor Filter Regulator
Air line lubricatorc
Air Compressor Filter Regulator
FRL Unit
All Product Information
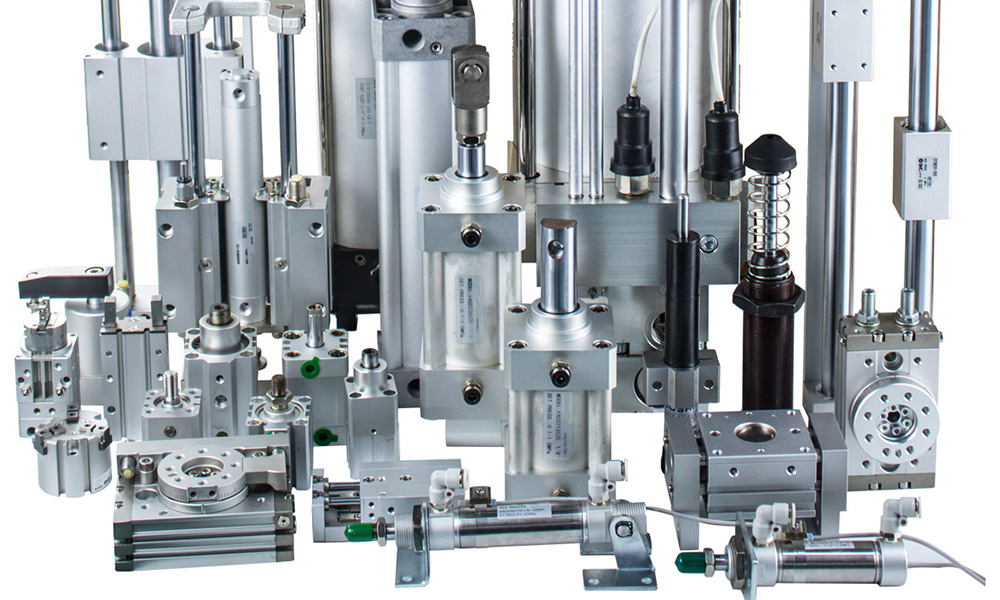
Pneumatic Valves
Air Filter Regulator Lubricator